자율주행차의 역할에 대한 다양한 정보
자동 운전 차의 역할 생활의 요령 자동 운전 차는 드라이버 대신 스스로 도로를 주행하는 자동차로 차내에 탑승한 승객이 운전하지 않아도 됩니다.그 때문에 다양한 센서, 카메라, 레이더 같은 기술을 사용하고 주변 환경을 감지하고 이를 분석하고 적절한 주행 결정을 내리는 시스템을 가지고 있습니다.자동 운전 차는 크게 3가지 역할을 합니다.1번째는 환경 검출입니다.자동 운전 차는 각종 센서를 사용하고 주변 환경을 검출하고 분석합니다.예를 들면 카메라는 도로 신호, 차선, 교차로 신호 등을 인식하고 레이더는 주변 차량 속도와 거리를 측정합니다.이런 환경 검출에 의한 자동 운전 차는 주행에 필요한 정보를 수집하고 분석합니다.두번째는 주행 결정입니다.자동 운전 차는 환경 감지를 통해서 수집한 정보를 분석하고 적절한 주행 결정을 내립니다.예를 들면 차선 변경이 필요한 상황에서는 주변 차량 속도와 거리를 고려하고 안전하게 차선을 변경할 수 있습니다.이들의 주행 결정은 사전에 설정된 규칙과 알고리즘에 기초하고 합니다.3번째는 주행 제어입니다.자동 운전 차는 주행 결정에 근거하여 실제에 차량을 제어합니다.그 때문에 자동차 엑셀, 브레이크, 조향 장치 등을 제어하고 실제로 주행합니다.이들의 주행 제어는 정밀 제어 알고리즘을 사용하여 안전하고 원활합니다.자동 운전 차의 역할은 운전자의 부담을 덜어 주고 더 안전한 주행 환경을 갖추는 것입니다.드라이버는 자동 운전 차에 주행을 맡기고 차량은 환경을 감지하고 적절한 주행 결정을 내리는 안전하게 운전합니다.또한 자동 운전 차는 운전자의 부실 운전 부주의로 인한 불상사를 최소화하고 체증 문제를 완화하는 등 효율적인 교통 시스템의 구축에도 공헌합니다.

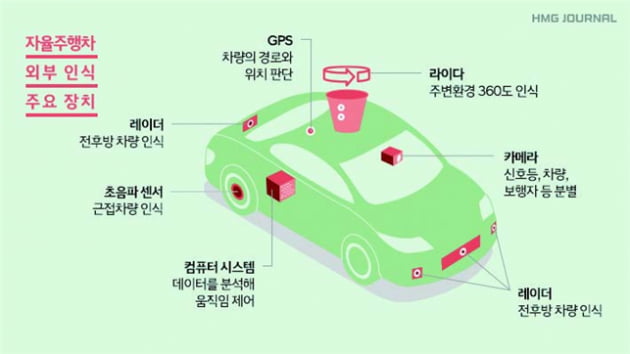
자동 운전 차의 설치 방법 정보의 변화자동 운전 차는 설치 과정이 상당히 복잡하지만 다음에 자세히 설명합니다.1. 센서와 하드웨어 설치:첫 단계는 자동 운전 차의 주요 구성 요소인 센서와 하드웨어를 설치하는 것입니다.이들의 센서는 차의 주위 환경을 검출하고 데이터를 수집하는 역할을 합니다.통상, 카메라, 레이더, 라이더, 울트라 소닉 센서 등이 사용됩니다.이들 센서를 차체 전방, 후방 측면 등에 적절한 위치에 설치할 필요가 있습니다.또 GPS나 IMU(Inertial Measurement Unit)등의 추가 하드웨어도 설치할 필요가 있습니다.2. 컴퓨팅 플랫폼의 설정:다음에 할 일은 자동 운전 시스템을 구동하는 컴퓨팅 플랫폼을 설정하는 것입니다.자동 운전 차는 실시간으로 대량의 데이터를 처리해야 하기 때문에 강력한 컴퓨터와 그래픽 카드가 필요합니다.이들의 컴퓨팅 리소스를 제공할 수 있는 적절한 컴퓨팅 플랫폼을 선택하고, 그것을 차량 내부에 설치할 필요가 있습니다.3. 소프트웨어 설치:컴퓨팅 플랫폼이 설정되면 자동 운전 소프트웨어를 설치할 필요가 있습니다.이들 소프트웨어는 센서로부터 수집한 데이터를 분석하고 의사 결정을 내리는 역할을 합니다.주행 경로 계획, 사물 인식, 도로 상황 인식 등 다양한 알고리즘이 이 소프트웨어에 포함되는 경우가 있습니다.통상 운영시스템에 관련된 소프트웨어, 뉴럴 네트워크 등이 설치되어야 합니다.4. 시험 주행 및 보완:자동 운전 차를 설치한 후는 시험 주행을 통해서 시스템의 기능과 성능을 확인할 필요가 있습니다.시험 주행은 안전한 환경에서 천천히 시작한 뒤 시스템이 예상대로 동작하는지 확인하는 과정입니다.이러한 주행 중은 모든 데이터를 기록하고, 주행 중에 발생하는 문제를 분석하고 보완할 필요가 있습니다.5. 관리:자동 운전 차를 설치한 후도 정기적인 정비가 필요합니다.센서의 정확성과 하드웨어의 상태를 확인하고 소프트웨어 업데이트와 버그 수정을 위한 작업이 필요합니다.또, 초심자 드라이버와 상호 작용, 교통 룰이나 법 준수 등에 관한 개선점도 고려해야 합니다.이런 설치 과정을 통해서 자동 운전 차의 설치에 성공하고 향후 자동차 산업과 도로 안전에 큰 영향을 미칠 것으로 기대됩니다.
인기글





